Identification premier ordre
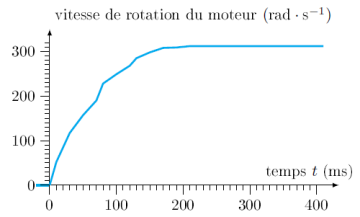
Soit la courbe de réponse en boucle ouverte mesurée d'un axe de robot. La tension de consigne est un échelon d'amplitude \(e_0=21\text{V}\).
La courbe ci-contre indique la mesure de la vitesse de rotation du moteur obtenue en \(rad.s^{-1}\).
Question
Proposer un modèle de comportement de l'axe robot sous forme d'une équation différentielle à coefficients constants.
Solution
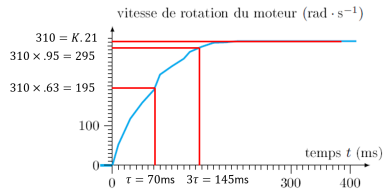
La valeur finale de 310 \(rad.s^{-1}\) nous donne \(K=310/21=14,76\text{ }rad.s^{-1}.V^{-1}\)
Le temps de réponse à 5% donne \(\tau=145/3=48\) ms alors que le relevé de la valeur à 63% donne \(\tau=70ms\). C'est souvent cette dernière méthode qui donne la valeur la plus fiable.