Définition et éléments de base
Nous avons vu précédemment qu'un système linéaire se caractérise par sa fonction de transfert H(p), et que l'entrée E(p), appliquée à ce système engendre la sortie S(p) telle que :
\[S(p)=H(p) \cdot E(p)\]
Pour faciliter la simulation du comportement d'un tel système, on utilise un outil de représentation graphique : un schéma-bloc. Ce dernier traduit graphiquement le comportement du système exprimé dans le domaine de Laplace.
Fondamental :
\[S(p)=H(p) \cdot E(p)\]

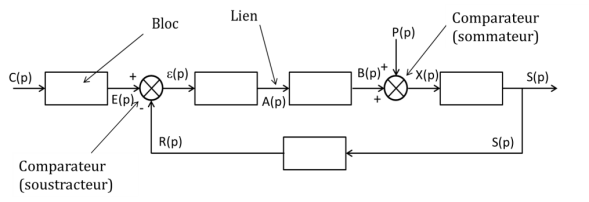
Le bloc représente le système ou un sous-ensemble d'un système et a un sens multiplicatif. Il contient la fonction de transfert et caractérise la relation entre les grandeurs d'entrée et de sortie.
La modélisation d'un système automatique complexe implique en général la présence de plusieurs blocs reliés entre eux.