Rapidité et dépassement des systèmes du second ordre
Remarques sur la rapidité et le dépassement des systèmes du second ordre :
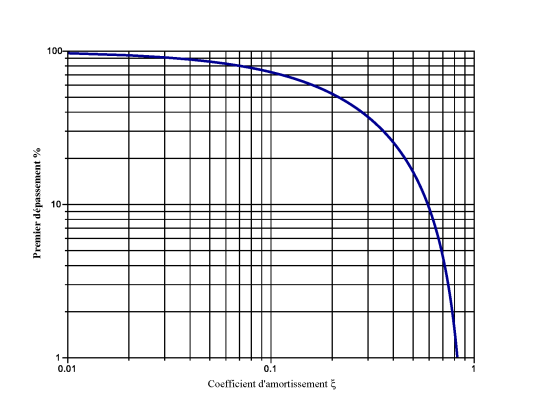
À partir de l'expression de la réponse indicielle des systèmes standards du second ordre, telle qu'elle a été exprimée précédemment, il est possible de tracer les deux abaques des figures ci-dessous, donnant l'évolution du temps de réponse réduit (\(tr_{5\%}.\omega_0\) ) et du premier dépassement (\(D_1\)) en fonction du coefficient d'amortissement.
Remarque :
L'abaque suivant permet de retrouver \(D_{1\%}\) en fonction de \(\xi\) et vice et versa:
Remarque :
L'abaque suivant permet de retrouver le temps de réponse réduit en fonction de \(\xi\) et vice et versa. Le temps de réponse réduit correspond au produit \(tr_{5\%}.\omega_0\)

Fondamental : Réponse la plus rapide.
Dans le cas où le cahier des charges autorise un dépassement le système le plus rapide est obtenu pour un amortissement \(\xi≈0,69\) comme le montre l'abaque qui donne le temps de réponse réduit en fonction de \(\xi\). Dans ce cas :
\(D_{1\%}=5\%\)
\(tr_{5\%}\approx\dfrac{3}{\omega_0}\)
Dans le cas où le système ne peut admettre aucun dépassement, le fonctionnement avec amortissement critique \(\xi=1\) présente la rapidité maximale avec \(tr_{5\%}=\frac{4,7}{\omega_0}\).