Liaisons en parallèle.
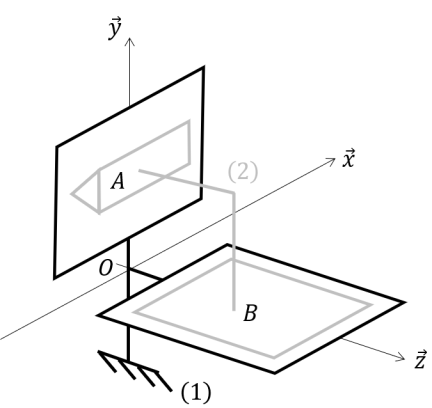
Soit le schéma cinématique ci-contre.
On pose : \(\overrightarrow{OA}=l_a.\vec{y}\) et \(\overrightarrow{OB}=l_b.\vec{z}\)
Question
Tracer le graphe des liaisons du mécanisme.
Solution

\(L_{12b}\) : liaison appui plan de normale \((B,\vec{y})\) et de normale \(\vec{y}\)
\(L_{12a}\) : liaison cylindre plan (linéaire rectiligne) d'axe \((A,\vec{x})\) et de normale \(\vec{x}\)
Question
Écrire les torseurs cinématiques de chaque liaison.
Solution
\(L_{12b}\) : \(\left\{ \mathcal{V}_{2 1b} \right\}=\left\{ \begin{array}{cc} 0 & V_{Bx}\\\omega_{21by} & 0 \\0 & V_{Bz}\end{array}\right\}_{B,B}\)
\(L_{12a}\) : \(\left\{ \mathcal{V}_{21a} \right\}=\left\{ \begin{array}{cc} \omega_{21ax} & V_{Ax}\\0 & V_{Ay} \\\omega_{21az} & 0\end{array}\right\}_{A,B}\)
Question
Déterminer la liaison équivalente.
Solution
Les liaisons sont en parallèle donc :
\(\left\{ \mathcal{V}_{eq} \right\}=\left\{ \mathcal{V}_{21a} \right\}=\left\{ \mathcal{V}_{21a} \right\}\)
Déplacement du torseur de la liaison 1-2b en 0 :
\(\overrightarrow{V} \left(0 \in 2/1b \right)=\overrightarrow{V} \left(B \in 2/1b\right)+\overrightarrow{0B} \wedge \overrightarrow{\Omega} \left(2/1 \right)b={\vphantom{\left| \begin{array}{c} x_1 \\ y_1 \\ z_1 \end{array} \right.}}_{B} \left| \begin{array}{c} V_{Bx} \\ 0 \\ V_{Bz} \end{array} \right.+{\vphantom{\left| \begin{array}{c} x_1 \\ y_1 \\ z_1 \end{array} \right.}}_{B} \left| \begin{array}{c} 0 \\ 0 \\ l_b \end{array} \right.\wedge{\vphantom{\left| \begin{array}{c} x_1 \\ y_1 \\ z_1 \end{array} \right.}}_{B} \left| \begin{array}{l} 0 \\ \omega_{21by} \\ 0 \end{array} \right.\)
\(\overrightarrow{V} \left(0 \in 2/1b \right)={\vphantom{\left| \begin{array}{c} x_1 \\ y_1 \\ z_1 \end{array} \right.}}_{B} \left| \begin{array}{l} V_{Bx}-l_b . \omega_{21by}\\ 0 \\ V_{Bz} \end{array} \right.\).
Déplacement du torseur de la liaison 1-2a en 0 :
\(\overrightarrow{V} \left(0 \in 2/1a \right)=\overrightarrow{V} \left(A \in 2/1a\right)+\overrightarrow{0A} \wedge \overrightarrow{\Omega} \left(2/1 \right)a={\vphantom{\left| \begin{array}{c} x_1 \\ y_1 \\ z_1 \end{array} \right.}}_{B} \left| \begin{array}{c} V_{Ax} \\ V_{Ay} \\ 0 \end{array} \right.+{\vphantom{\left| \begin{array}{c} x_1 \\ y_1 \\ z_1 \end{array} \right.}}_{B} \left| \begin{array}{c} 0 \\ l_a \\ 0 \end{array} \right.\wedge{\vphantom{\left| \begin{array}{c} x_1 \\ y_1 \\ z_1 \end{array} \right.}}_{B} \left| \begin{array}{l} \omega_{21ax} \\ 0 \\ \omega_{21az} \end{array} \right.\)
\(\overrightarrow{V} \left(0 \in 2/1a \right)={\vphantom{\left| \begin{array}{c} x_1 \\ y_1 \\ z_1 \end{array} \right.}}_{B} \left| \begin{array}{l} V_{Ax}+l_a . \omega_{21az}\\ V_{Ay}\\ -l_a . \omega_{21ax} \end{array} \right.\).
On obtient le système d'équation suivant :
\( \left| \begin{array}{l} \omega_{21ax}=0\\\omega_{21by}=0\\\omega_{21az}=0\\V_{Ax}+l_a . \omega_{21az}=V_{Bx}-l_b . \omega_{21by}\\V_{Ay}=0 \\ V_{Bz}= -l_a . \omega_{21ax} \end{array} \right.\)
On en déduit \(\omega_{21ay}=\omega_{21bz}=\omega_{21bx}=\omega_{21ax}=0\), \(V_{Bx}=V_{Ax}\) et \(V_{Ay}=V_{Bz}=0\).
D'où le torseur cinématique :\(\left\{ \mathcal{V}_{eq} \right\}=\left\{ \begin{array}{cc} 0 & V_{Ox}\\0 & 0 \\0 & 0\end{array}\right\}_{0,B}\)
On retrouve la forme du torseur cinématique d'une liaison glissière de direction \(\vec{x}\).