Représentations du mécanisme : graphe de liaison et schéma cinématique
Modéliser, c'est donner une représentation simplifiée du système pour faire apparaître plus clairement les propriétés intéressantes dans le point de vue de l'étude. En cinématique, seuls les mouvements des pièces sont étudiés. On utilise donc des représentations laissant apparaître uniquement les solides et les liaisons entre solides.
Définition : Graphe de structure
La première représentation utilisée est le graphe de structure, parfois appelé graphe des liaisons. Chaque solide est représenté par une ellipse (ou éventuellement un rectangle lorsqu'il s'agit d'un solide fixe) et chaque liaison est représentée par un arc entre deux solides.
Il est généralement précisé sur le graphe de structure les caractéristiques géométriques des liaisons, c'est à dire l'axe de rotation dans le cas d'une pivot (1 point + 1 vecteur), ou la direction de translation dans le cas d'une glissière (1 vecteur).
Exemple : Cas du manège à sensation
Le graphe de structure partiel du manège à sensation est présenté ci-dessous.

Le graphe de structure laisse apparaître une part du mécanisme en chaîne ouverte (la chaîne de solides 0, 1, 2, 3 et 4), et une part du mécanisme en chaîne fermée (la chaîne 0, 1, 6, 5, 0).
Le graphe de structure est un bon outil pour présenter l'organisation du système, mais il est insuffisant pour expliciter le paramétrage (les points géométrique, les bases, les paramètres angulaires et de longueur, etc...).
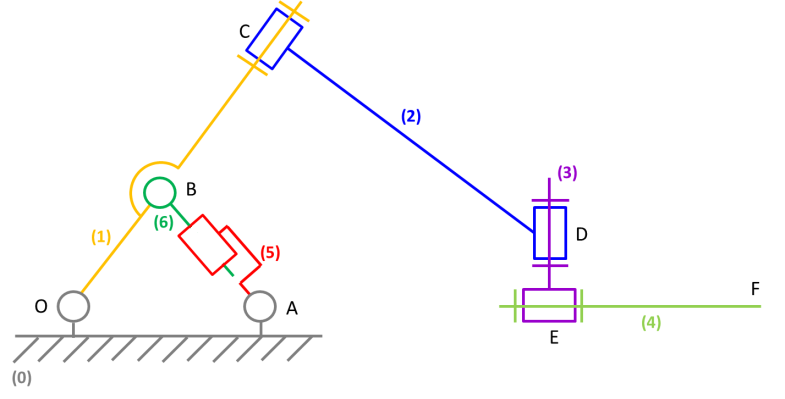
Définition : Schéma cinématique
On lui préfère alors le schéma cinématique, qui utilise une représentation normalisée des liaisons.
La figure ci-dessous montre le schéma cinématique du manège. On y retrouve la liaison pivot glissant entre 5 et 6, ainsi que les différentes liaisons pivots. Notez que la représentation dans le plan d'une liaison pivot ou pivot glissant dépend du plan dans lequel le schéma est réalisé et de la direction de la liaison : les directions des liaisons en O, C, D et E sont toutes différentes.