Degrés de liberté d'un solide dans l'espace
La position d'un solide \(S_k\) par rapport à un solide \(S_i\) dépend de six paramètres indépendants. Il est usuel en Mécanique de considérer :
les trois coordonnées du point origine du repère \(R_k\) dans le repère \(R_i\),
les trois angles qui définissent la position de la base \[\left(\vec{x_k},\vec{y_k},\vec{z_k}\right)\] du repère \(R_k\) par rapport à celle du repère \(R_i\).
Les possibilités de variation de ces six paramètres correspondent aux possibilités de mouvement du solide \(S_k\) par rapport au solide \(S_i\) .
Une possibilité de mouvement est appelée degré de liberté. Il existe donc au maximum six degrés de liberté (trois translations et trois rotations).
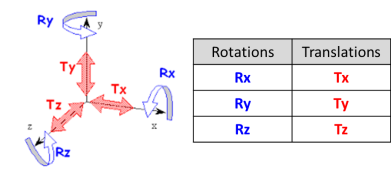
Degrés de liberté