Un voilier est équipé d'une grand-voile de 17,62 m², et d'un spinnaker de 68,62 m². Sa vitesse est de 15 nœuds. Par hypothèse simplificatrice le problème est ramené à un problème plan.
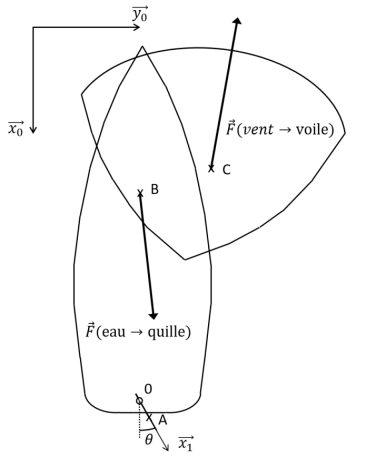
Le centre de voilure C n'étant pas aligné avec le centre de dérive B, la force aérodynamique F ⃗(vent→voile) et la force hydrodynamique F ⃗(eau→quille) créent un couple qui tend à faire tourner le bateau vers la gauche. L'action du barreur ou du pilote automatique permettra au bateau de garder sa route par l'intermédiaire de la force hydrodynamique sur le safran, appliquée en son centre A. Nous cherchons à déterminer cette force ainsi que l'angle θ qu'il faut donner au safran pour maintenir le bateau dans la même direction à vitesse constante.
On isole le système bateau = {coque+voile+safran}.
\(\overrightarrow{F}(\text{eau} \rightarrow \text{quille})=X_{\text{e} \rightarrow \text{q}}.\overrightarrow{x_0}+Y_{\text{e} \rightarrow \text{q}}.\overrightarrow{y_0}\),
\(\overrightarrow{F}(\text{vent} \rightarrow \text{voile})=X_{\text{v} \rightarrow \text{v}}.\overrightarrow{x_0}+Y_{\text{v} \rightarrow \text{v}}.\overrightarrow{y_0}\),
\(\overrightarrow{F}(\text{eau} \rightarrow \text{safran})=X_{\text{e} \rightarrow \text{s}}.\overrightarrow{x_0}+Y_{\text{e} \rightarrow \text{s}}.\overrightarrow{y_0}\)
Question
Pour chacune des actions mécaniques identifiées ci-dessus, proposer un modèle de cette action sous forme d'un torseur d'action mécanique exprimé dans la base \(B_0\).
Solution
\[\left\{ \mathcal{T} \left({eau}\rightarrow {quille}\right)\right\} =\left\{ \begin{array}{c} X_{\text{e} \rightarrow \text{q}}.\overrightarrow{x_0}+Y_{\text{e} \rightarrow \text{q}}.\overrightarrow{y_0} \\ \overrightarrow{0} \end{array}\right\}_B\]\[\left\{ \mathcal{T} \left({vent}\rightarrow {voile}\right)\right\} =\left\{ \begin{array}{c} X_{\text{v} \rightarrow \text{v}}.\overrightarrow{x_0}+Y_{\text{v} \rightarrow \text{v}}.\overrightarrow{y_0} \\ \overrightarrow{0} \end{array}\right\}_C\]\[\left\{ \mathcal{T} \left({eau}\rightarrow {safran}\right)\right\} =\left\{ \begin{array}{c} X_{\text{e} \rightarrow \text{s}}.\overrightarrow{x_0}+Y_{\text{e} \rightarrow \text{s}}.\overrightarrow{y_0} \\ \overrightarrow{0} \end{array}\right\}_A\]