Cas du manège à sensations
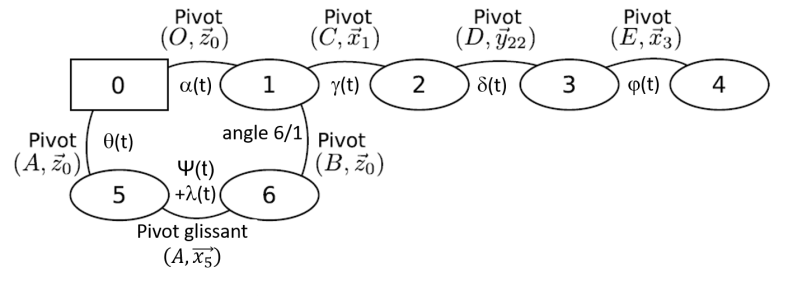
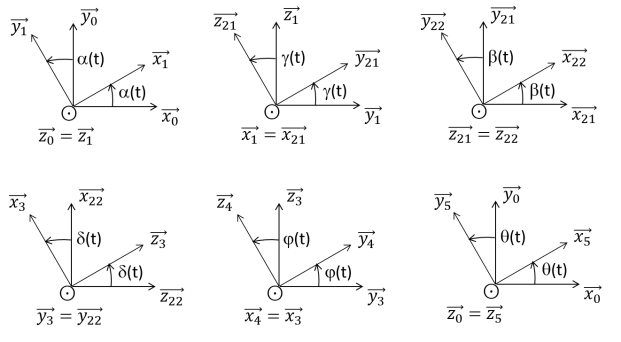
On rappelle le paramétrage du modèle du manège donné précédemment et les figures planes de changement de base réalisées dans le premier polycopié.
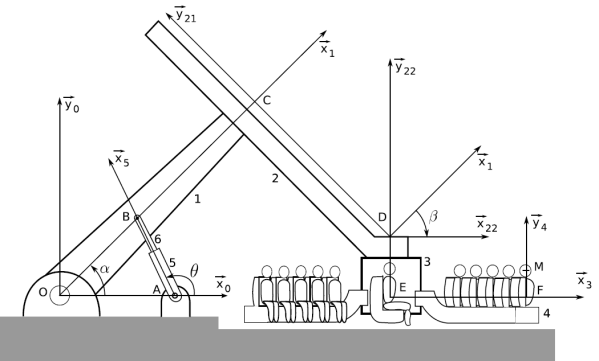
\(\vec{OA}=a.\vec x_0 ; a=1.5\;m\)
\(\vec{OB}=b.\vec x_1 ; b=1.5\;m\)
\(\vec{OC}=c.\vec x_1 ; c=4\;m\)
\(\vec{CD}=-d.\vec y_{21} ; d=4\;m\)
\(\vec{DE}=-e.\vec y_{22} ; e=1\;m\)
\(\vec{EF}=f.\vec x_3 ; f=3\;m\)
\(\vec{FM}=h.\vec y_4 ; h=0.5\;m\)
\(\vec{AB}=\lambda.\vec x_5\)
Question
Donner l'expression des vecteurs vitesse de rotation suivants :
\(\vec{\Omega}(1/0)\)
\(\vec{\Omega}(5/0)\)
\(\vec{\Omega}(2/1)\)
\(\vec{\Omega}(3/2)\)
\(\vec{\Omega}(4/3)\)
Solution
\(\vec{\Omega}(1/0)=\dot{\alpha}.\vec{z_0}\)
\(\vec{\Omega}(5/0)=\dot{\theta}.\vec{z_0}\)
\(\vec{\Omega}(2/1)=\dot{\gamma}.\vec{x_1}\)
\(\vec{\Omega}(3/2)=\dot{\delta}.\vec{y_{22}}\)
\(\vec{\Omega}(4/3)=\dot{\varphi}.\vec{x_3}\)
Question
Calculer le vecteur vitesse du point C par rapport au référentiel 0
Solution
\(\overrightarrow{V}\left(C/0 \right)=\left(\frac{d\overrightarrow{OC}}{dt}\right)_{0}=\left(\frac{d (c.\vec x_1)}{dt}\right)_{0}=c.\left(\frac{d \vec x_1}{dt}\right)_{0}\)
Pour dériver le vecteur \(\vec{x_1}\) qui n'est pas constant par rapport au référentiel 0, on utilise la formule de Bour vue au début de ce polycopié :
\(\left.\frac{d\vec{x_1}}{dt}\right|_{0}=\left.\frac{d\vec{x_1}}{dt}\right|_{1}+\overrightarrow{\Omega}(1/0)\wedge \vec{x_1}\)
\(\left.\frac{d\vec{x_1}}{dt}\right|_{1}=\vec{0}\) car le vecteur \(\vec{x_1}\) est constant par rapport à la base 1
\(\vec{\Omega}(1/0)=\dot{\alpha}.\vec{z_0}\) (calculé dans l'exercice précédent)
D'où :
\(\left.\frac{d\vec{x_1}}{dt}\right|_{0}=\dot{\alpha}.\vec{z_0}\wedge \vec{x_1}=\dot{\alpha}.\vec{y_1}\) et \(\overrightarrow{V}\left(C/0 \right)=c.\dot{\alpha}.\vec{y_1}\)
Question
Calculer le vecteur vitesse du point B par rapport au solide 5
Solution
\(\overrightarrow{V}\left(B/5 \right)=\left(\frac{d\overrightarrow{AB}}{dt}\right)_{5}=\left(\frac{d (\lambda.\vec x_5)}{dt}\right)_{5}=\dot{\lambda}.\vec{x_5}\) car le vecteur \(\vec{x_5}\) est constant par rapport au référentiel 5.
Question
Calculer le vecteur vitesse du point D par rapport au solide 1.
Solution
Calcul du vecteur vitesse du point D par rapport au solide 1 :
\(\overrightarrow{V}\left(D/1 \right)=\left(\frac{d\overrightarrow{CD}}{dt}\right)_{1}=\left(\frac{d (-d.\vec y_{21})}{dt}\right)_{1}=-d.\left(\frac{d \vec y_{21}}{dt}\right)_{1}\)
On dérive le vecteur \(\vec{y_{21}}\) par rapport au repère 1 :
\(\left.\frac{d\vec{y_{21}}}{dt}\right|_{1}=\left.\frac{d\vec{y_{21}}}{dt}\right|_{2}+\overrightarrow{\Omega}(2/1)\wedge \vec{y_{21}}\)
\(\left.\frac{d\vec{y_{21}}}{dt}\right|_{2}=\vec{0}\) car le vecteur \(\vec{y}_{21}\) est constant par rapport à la base 2
\(\vec{\Omega}(2/1)=\dot{\gamma}.\vec{x_1}\) (calculé dans l'exercice précédent)
D'où :
\(\left.\frac{d\vec{y_{21}}}{dt}\right|_{1}=\dot{\gamma}.\vec{x_1}\wedge \vec{y_{21}}=\dot{\gamma}.\vec{z_{21}}\) et \(\overrightarrow{V}\left(D/1 \right)=-d.\dot{\gamma}.\vec{z_{21}}\)
Question
Déterminer l'accélération du point C par rapport au référentiel 0
Solution
\(\overrightarrow{\Gamma}\left( C/0 \right)=\left(\frac{d\overrightarrow{V}\left( C/0 \right)}{dt}\right)_{0}=\left(\frac{d(c.\dot{\alpha}.\vec{y_1})}{dt}\right)_{0}=c.\left(\frac{d(\dot{\alpha}.\vec{y_1})}{dt}\right)_{0}\) (car \(c\) est une distance constante).
Comme \(\dot{\alpha}\) est une fonction du temps et que le vecteur \(\vec{y_1}\) est variable par rapport au référentiel 0, on doit dériver un produit, soit :
\(\overrightarrow{\Gamma}\left( C/0 \right)=c.\left[\ddot{\alpha}.\vec{y_1}+\dot{\alpha}.\left(\frac{d\vec{y_1}}{dt}\right)_{0}\right]\)
Avec : \(\left(\frac{d\vec{y_1}}{dt}\right)_{0}=\left(\frac{d\vec{y_1}}{dt}\right)_{1}+\overrightarrow{\Omega}(1/0)\wedge \vec{y_1}=-\dot{\alpha}.\vec{x_1}\)
D'où :
\(\overrightarrow{\Gamma}\left( C/0 \right)=c.(\ddot{\alpha}.\vec{y_1}-\dot{\alpha}^2.\vec{x_1})\)