Choix d'une décomposition structurelle
Une description structurelle vise à décomposer le système non pas en fonction et sous-fonctions mais en composants et sous-composants. L'architecture classique des systèmes fait appel à différents types de composants qu'il vous est demandé de savoir identifier et décrire sur les supports de TP ou des systèmes réels que nous étudierons.
Un système automatisé peut dans la plupart des cas être décomposé en deux parties : la partie commande et la partie opérative.
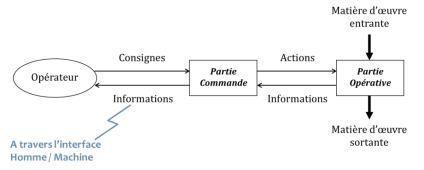
La Partie Commande (PC) échange et traite les informations avec l'extérieur, avec l'opérateur et avec la partie opérative pour commander la partie opérative. Elle représente le "cerveau" du système. Les puissances manipulées sont souvent faibles (alimentation 5 V en électrique, 15 bars en hydraulique, etc...).
Les principales techniques rencontrées dans les parties commandes sont les technologies câblées :
électriques,
pneumatiques,
éléctro-pneumatiques,
et les technologies programmées :
électroniques,
logiciels.
Plusieurs types de technologies peuvent être utilisés dans la partie commande d'un même système.
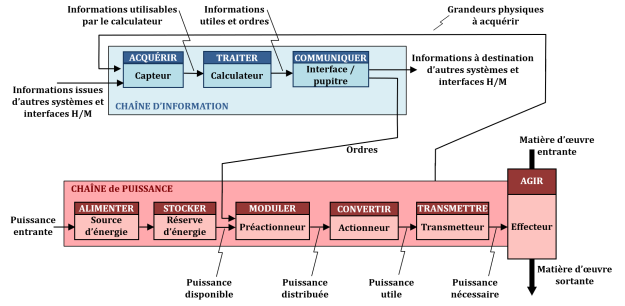
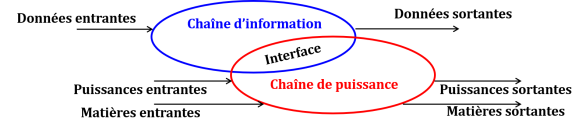
Il est possible de classer les composants d'un système en deux sous-ensembles :
• Le premier est un ensemble de composants agissants sur les flux de données, que l'on nomme chaîne d'information
• Le premier est un ensemble de composants agissants sur les flux de matière et d'énergie, que l'on nomme chaîne de puissance
Ces deux chaînes peuvent elles-mêmes ensuite être décomposées en différentes fonctions. Un exemple générique de décomposition est donné ci-dessous.