Structures d'un système de commande
Commande en chaîne directe ou Boucle Ouverte (BO)
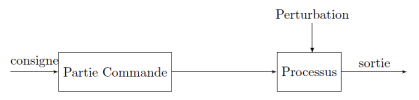
Un système fonctionne en chaîne directe s'il n'y a pas de contrôle sur la manière dont la commande a été exécutée (cf. figure ci-dessous ou d'un radiateur fonctionnant sans régulation automatique de température).

Lorsque le système fonctionne dans son environnement, il arrive fréquemment qu'il soit soumis à des phénomènes non contrôlés par l'utilisateur, qui peuvent modifier son comportement. Par exemple pour une pièce chauffée par un radiateur, il peut s'agir de la température extérieure, de l'ouverture d'une fenêtre ou d'une porte.
On distingue donc deux types d'entrées sur un système : consigne et perturbation (cf. figure ci-dessous).
Pour obtenir le comportement attendu malgré la présence de perturbations, on réalise un asservissement du système de commande, qui fonctionne alors en boucle fermée.
Asservissement du système de commande, ou commande en Boucle Fermée (BF)
Un système fonctionne en boucle fermée si une mesure de la sortie est réalisée afin de la comparer à la consigne et d'agir sur le système en conséquence (cf. figure ci-dessous).
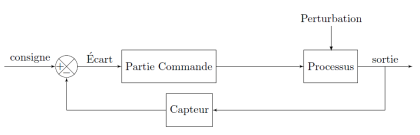
L'asservissement du système de commande consiste à mesurer la sortie, pour calculer un écart par rapport à la consigne. Cet écart devient la grandeur d'entrée du processus. Les composants intervenant dans la mesure de la sortie et sa comparaison avec la consigne constituent la chaîne de retour.
Plusieurs types de systèmes asservis peuvent être distingués :
Définition : Régulateur
Un système asservi régulateur est un système dont la grandeur de consigne reste le plus souvent constante. Le rôle de l'asservissement consiste principalement à lutter contre les perturbations.
Définition : Suiveur
Un système asservi suiveur est un système dont la grandeur de consigne a vocation à évoluer. Le rôle de l'asservissement est principalement de suivre la consigne.
Les systèmes asservis peuvent également être classés en fonction de la nature de la grandeur physique de sortie : par exemple, si celle-ci est la vitesse d'un véhicule, on parle d'asservissement de vitesse. Les asservissements de position, de température, de force, sont aussi courants.
Exemple :
pour adapter la température d'une pièce, il est possible d'agir manuellement sur les radiateurs de façon à s'approcher de la température de confort.
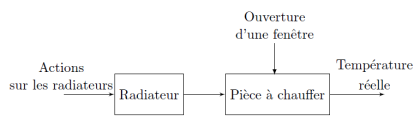
Sur la figure ci-dessus, le système est piloté en boucle ouverte : lorsqu'une perturbation telle que l'ouverture d'une fenêtre intervient, la température de la pièce se trouve modifiée. Il faut réintervenir manuellement sur le réglage des radiateurs ou agir sur la perturbation (fermer la fenêtre).
Sur la figure ci-dessous, la régulation de la température est réalisée automatique à l'aide d'un thermocouple (capteur de température) et une boucle de rétroaction.
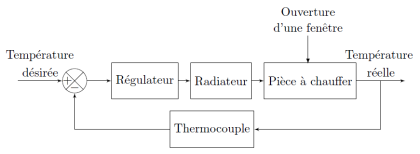
Dans cet exemple, la température désirée, appelée consigne (température souhaitée et fixée par un thermostat), est comparée à la température réelle de la pièce mesurée par le thermocouple. Le régulateur déclenche alors une action correctrice, dont le sens et l'intensité dépendent de l'écart entre la température souhaitée et la température de la pièce.